

自动驾驶:从不可能到可能
 雷锋网 合作伙伴
雷锋网 合作伙伴现代汽车时代是从竞争开始的。
在19世纪90年代早期,人们对新兴的无马车技术产生了浓厚的兴趣,当时,它有望集火车的速度、马车的灵活性和自行车的便利性于一身。法国的Le Petit Journal报社凭借其强大的宣传影响力举办了一场比赛,欲比较出蒸汽、电力或汽油三者谁才是最佳的推动力。该报邀请参赛者从巴黎开车到79英里外的鲁昂。该评比并不是以他们车辆的速度来一较高下,而是考察这些车是否安全、易于使用和有商业价值。
这场比赛于1894年7月举行,共有21辆全新发明的车从巴黎出发,吸引了众多围观者。最后,只有17辆车完成了比赛。比赛路上,有七条狗被撞倒,一名自行车手受伤。最终,赢得大奖的,是一名叫做Gottlieb Daimler(哥特利布·戴姆勒)的发明家。

在这次比赛中,他一共派出了9辆由其发明的内燃机驱动的汽车,其中,有4辆同时获得了一等奖。裁判宣布,戴姆勒为车辆提供了“石油或汽油燃料转化成的内在动力”,这种车开始有了一个法语名字——“Automobile”(汽车)。戴姆勒的胜利确立了汽车在20世纪的霸主地位,汽车这个术语很快就渗透到英语和其他语言中。
有意思的是,现代自动驾驶汽车的时代也是从比赛开始的。2004年3月,美国主要的军事研究机构DARPA在莫哈韦(Mojave)沙漠组织了一场比赛,要求无人驾驶车辆驾驶150英里的越野路线。这场比赛共有21支队伍获得参赛资格,但经过赛前评比和意外事故后,最终只有12辆车参赛。由于机械故障和陷入沙坑等问题,所有参赛队伍都没有跑完全程。卡内基梅隆大学的“沙尘暴”(Sandstorm),跑出了最佳成绩,在被卡住之前行驶了7.4英里。在它试图解救自己的时时候,不幸前轮起火。
看来DARPA似乎设置了太高的标准。2005年10月,他们举行另一场比赛时,23支参赛队伍中有5支完成了132英里的路程,剩下的,只有一支队伍未能完成一年前的7.4英里的记录。斯坦福大学Sebastian Thrun所领导的一支队伍获得第一名,卡内基梅隆大学的“沙尘暴”排名第二。

在短短的18个月里,自动驾驶就从不可能变成了可能。在2007年11月的第三次DARPA比赛中,参赛车辆必须在模拟的城市环境中完成任务,处理路标、交通信号和其他车辆等问题。11支团队中,有6支完成了这个更复杂的挑战。
这种快速的发展步伐,令Google在2009年建立了由Thrun领导的自动驾驶汽车项目。自那时起,DARPA竞赛的参赛者们已经开始在Google、Uber、特斯拉和许多初创公司开展自动驾驶技术研究。2012年,自动驾驶原型车开始进入美国公共道路,他们已经行驶了数百万英里,也变得更加安全可靠。但这项技术离大规模部署还有一段距离。
真正的完全自动驾驶汽车必须解决三个独立的任务:感知(了解周围世界发生了什么)、预测(确定下一步会发生什么)和驾驶策略(采取适当的行动)。Thrun说,最后一个任务是最简单的,自动驾驶中只有10%的问题与之有关,而感知和预测则是较困难的部分。
自动驾驶汽车通过摄像头、雷达和激光雷达等传感器来感知世界。类似雷达,激光雷达,使用不可见的光脉冲来绘制周围区域的高精度3D地图。摄像头、雷达和激光雷达三者是相辅相成的关系。摄像头便宜,可以看到道路标记,但却不能测量距离;雷达可以测量距离和速度,但却捕捉不到细节;激光雷达提供了很好的细节,但是价格昂贵,并且容易将雪地和其他地形混淆。
大多数从事自动驾驶工作的人都认为,有必要将几种传感器组合起来确保安全性和可靠性。(不过,特斯拉是一个明显的例外:它希望在不使用激光雷达的条件下实现完全自动驾驶)。目前,高端的激光雷达系统要数万美元,初创公司正在研发新的固态激光雷达,有望最终将激光雷达的价格降低到几百美元。

结合来自传感器的数据后,汽车需要识别周围的物体:其他车辆、行人、骑自行车的人、路面标记、道路标志等。在识别方面,人类比机器要好得多,机器必须通过大量仔细标记的样本训练过后才有这样的能力。获得这些样本的一种方法是雇人手动标记图像。
位于西雅图的Mighty AI拥有一个30万人的在线社区,他们为许多汽车企业客户标记街景图像。“我们希望汽车能够有人的判断力,”Mighty AI的老板Daryn Nakhuda说,“因此我们需要人类专业技能的帮助。”
一些来自视频游戏的图像,如《侠盗猎车手》中的图像,与现实街景非常接近,也可以起到帮助做用。因为游戏软件知道一切事物,它可以准确地标记这些场景,因此这些图像也可以用于训练。
Thrun说,最难识别的是那些很少见的东西,例如路上的垃圾或是在高速公路上被吹起的塑料袋。他回忆起Google的自动驾驶项目早期的时候,“我们的感知模块无法区分出物体究竟是塑料袋还是飞奔的孩子。”路上的水坑也让识别系统混淆。不过,结合来自多个传感器的数据就可以分辨道路上的物品是否为坚硬的障碍物。
传感器获得的数据还能够与先前在同一条路上行驶的其他车辆收集的传感器数据进行比较,这种相互交流的过程被称为“车队学习”。自动驾驶的先行者们已经积累了许多的数据,这让他们占一定的优势,但一些创业公司也在制作和销售现成的供自动驾驶汽车使用的高精度地图。
一辆车识别出周围的一切之后,它就需要立刻预测未来几秒会发生什么并决定如何应对。道路标志,交通信号灯,停车灯和转向标志也提供了一些提示。但是,自动驾驶车辆在某些地方还离人类驾驶员还是有差距的,人类驾驶员擅于处理一些意外情况,例如道路施工、抛锚的车辆、运输卡车,紧急车辆、倒下的树木或恶劣的天气等。雪是一个特殊的挑战:激光雷达系统必须仔细调整才能忽略飘落的雪花,道路积雪也会降低高精度地图的准确度。
虽然高精度地图技术仍在开发中,但它对于一些限定的地区还是有帮助的,这些地区已有了详细绘制的地图并且通常天气很好。这就解释了为什么阳光灿烂、道路规划整齐的凤凰城能成为测试自动驾驶车辆的热门城市。而匹兹堡则由于其恶劣的天气,是一座测试难度比较大的城市。
被通用汽车收购的自动驾驶创业公司Cruise,则选择在旧金山市中心复杂的街道上进行测试,其表现也给人们留下了深刻的印象。Cruise的创始人 Kyle Vogt认为,在人口稠密的环境中进行测试意味着汽车会经常遇到异常情况,因此能学得更快。
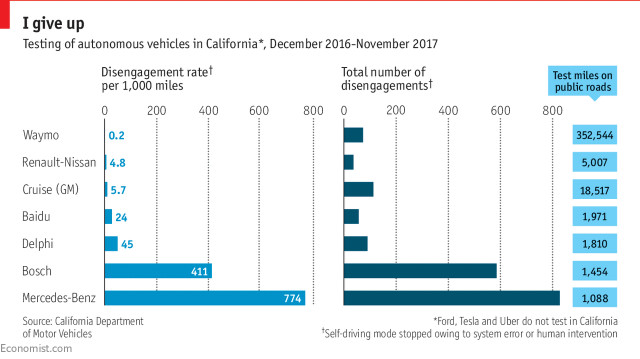
当自动驾驶车辆感到困惑并且不知道如何回应或做出错误决定时,驾驶座上的安全工程师就会接管。这就是所谓的“脱离”,每千英里的脱离数为对比自动驾驶相关公司提供了一个粗略衡量标准(见上图表)。不过,最好还是不要将脱离视为失败的情况,脱离其实是有助于自动驾驶系统吸取经验并改进的。
Uber自动驾驶汽车部门的安全负责人Noah Zych表示,在接近脱离状态时记录的传感器数据可以揭示汽车出了什么问题。然后就可以在模拟中对同一问题进行测试,然后修改软件。Zych说:“我们可以一次又一次地测试,改变情景,分析不同的结果,”改进后的软件最后会在真实汽车中使用。
就算自动驾驶现在就能被广泛部署,他们仍然偶尔需要人的帮助。无人驾驶接驳车制造商Navya的CEO Christophe Sapet举了个例子:在一个两车道的路上,自动驾驶汽车由于不敢越过道路中的实线而追尾了一辆抛锚的卡车。产生这种结果的原因,是自动驾驶汽车被编程、被设定必须遵守交通规则(而不会随机应变)。但如果是人类,只要对面没车,就会压过实线绕开这两卡车。
Navya的自动驾驶车辆则会向远程监督中心求助,人类操作员可以看到车辆摄像头拍摄的实时信号。遇到刚刚所说的情况时,操作人员并不会直接远程控制一起,而是在保证安全的情况下允许该车压过实线行驶。Thrun预测,这些操作员在未来可能会一次监控数千辆自动驾驶车。
与此同时,低配版的自动驾驶在正在逐渐加入到现有的汽车之中。由美国汽车工程师协会制定的量化表将自动驾驶水平分成了5个等级。Level 1级别的自动驾驶包括基本的协助(如巡航控制)。Level 2级别增加了诸如车道保持等功能,令汽车能够在高速公路上行驶,但仍要求驾驶员时刻注意。奥迪今年推出的A8是第一款达到Level 3级别的车型,它能够自动驾驶并监控周围环境,但在系统要求时,驾驶员及时必须接管。

*奥迪A8
Waymo、Uber和其的公司则试图直接跳到Level 4级别,即在特定的条件下,例如在城市的特定地区,车辆能够完全自动驾驶。一些业内人士认为,Level 2级别和Level 3级别这种不完全的自动驾驶是不安全的,因为即使系统控制了车辆,驾驶员仍然需要时刻注意,而驾驶员们很难做到这一点。
2016年5月,一辆特斯拉Model S撞上了一辆卡车,司机在事故中丧生,调查人员发现,尽管Autopilot系统已经发出警告,但司机仍然未能留意道路情况。特斯拉的Autopilot就属于Level 2级别。
自动驾驶汽车的面临的一个问题是,道路是为了人类司机而建的,自动驾驶汽车必须与之共享道路。人会通过灯光和使用其他非语言的提示进行交流,这些提示因地而异。自动驾驶的技术制造商Mobileye的CTO Amnon Shashua认为,自动驾驶车辆可能最终能够适应周围环境,例如,在波士顿开车就要比在加州猛一些。
自动驾驶汽车公司Aurora的CEO Chris Urmson说:“我们必须让汽车能够在像今天这样的世界中运行。”
但将来,事情可能会变得容易些。在未来,可能会出现自动驾驶车辆专用的道路或区域,以及用于支持它们的专用设备,即V2I(车对基础设备)技术。在一些已经有自动驾驶汽车运行的地区,已经对交通信号灯做了一些修改。未来,V2I和V2V(车对车)技术能够帮助自动驾驶车辆更好地相互协调。
公众似乎主要担忧与自动驾驶汽车有关的两种潜在风险:第一种就是他们应该如何面对道德困境。比如说,在撞到一群孩子和撞向另一辆车之间进行选择。许多业内人士认为,这些问题并不能反映现实世界。
第二个担忧就是网络攻击。自动驾驶汽车本质上是安装在车上的计算机,可能会被远程劫持和破坏。不过,自动驾驶业内的工程师们则坚持,他们非常重视网络安全,他们所建立的多重冗余传感器和控制系统,在技术上说,可以提供一定的安全保障。如果一辆自动驾驶车中的任何部分开始出现异常的行为,无论出于何种原因,这辆车都会停下来。Sapet开玩笑说:“想使用普通汽车杀人比使用无人驾驶汽车更容易。”
自动驾驶车辆很快就要进入我们的生活了,至少能在天气良好、有序的环境中行驶。“一旦你找到了问题的关键,它就能渐渐被完全解决。” Urmson说。
从不可到可能,从可能到现实生活,尽管公众仍有担忧,但自动驾驶的发展速度,可以说是越来越快了。



